MVRV200柔性生产线系统,主要由工业机器人和机器视觉组成,结合环形流水线,完成工件的全自动化智能加工作业。

机器视觉部分采用自主研发的智能软件,其主要作用是对工件定位,并将位置信息发送给机器人,引导机器手臂根据定位结果,对工件进行装配或其他动作。
所谓定位就是通过图像传感器找到被测的零件并确定其位置,输出位置坐标(X、Y、R),绝大多数的视觉系统都必须完成这个工作;引导就更容易理解了,当被测物体的坐标(X、Y、R)被准确定位之后,常常需要根据上一步的定位结果完成下一个动作(如机械手的抓取),但图像传感器输出的定位坐标(X、Y、R)往往是相对图像原点的坐标关系,要准确引导机械手抓取产品,就必须将图像传感器定位坐标(X、Y、R)转化成相对机械手原点的坐标。
视觉定位引导系统一般按照视觉图像传感器与工业机器人的相互位置分两类:
1、Eye-in-hand
2、Eye-to-hand。
本系统采用Eye-in-hand。
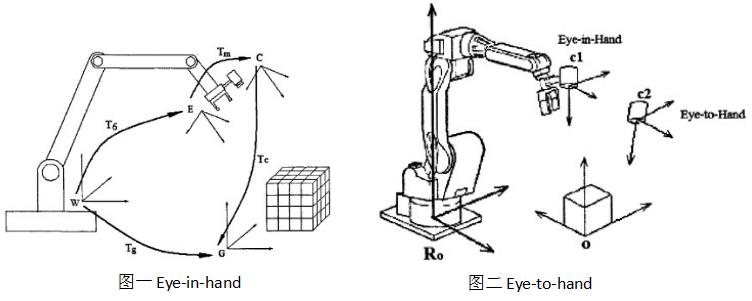
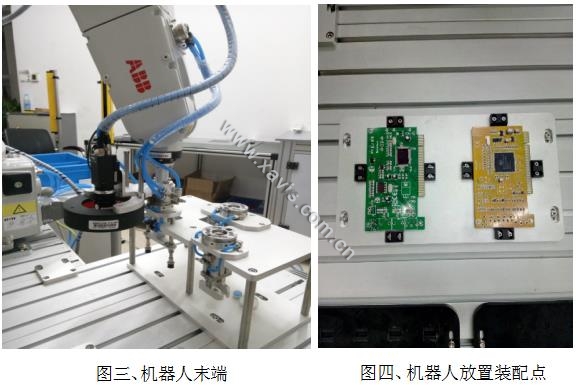
Eye-in-hand优点:图像传感器安装在机器人的最末端,在机器人工作过程中与机器人互动,在抓取目标物的过程中,随着机器人共同接近目标,Eye-in-hand这种安装方式将会减少不必要FOV和图像传感器的数量,对于图像传感器的精度要求低于Eye-to-hand;因为在图像成像中形成闭环控制系统,图像传感器的标定误差能有效的克服,因而对图像传感器的精度要求并不是很高,但随着目标物的接近,整个测量的绝对误差将会降低。
1、硬件部分:
视觉定位引导系统由工业相机、光源、镜头、图像采集卡、工业PC、工业机器人本体、控制器和驱动器、流水线、电气控制元件等组成。
2、软件部分:
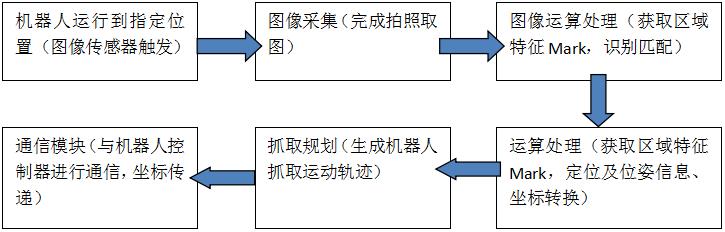
软件部分完成图像采集及运算处理,其处理主要包括:特征识别与定位、位姿估算、坐标转化、坐标输出、与机器人本体通信完成坐标传递,执行流程如下:
1、一键完成相机坐标系和机器人坐标系的校准,校准时间小于5分钟。

2、一键完成视觉系统训练,视觉系统自动移动机器人和相机经过多个位置,用以测量物体的特征来自动构建工件的数学模型。
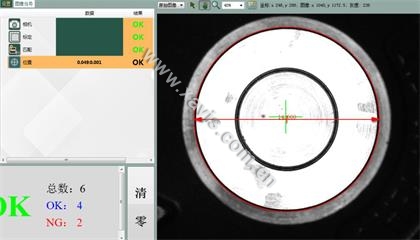
案例1:金属件圆心精确定位,传送数据给机械手臂,机械手臂根据定位位置焊接工件。难点:精度需要达到0.02mm以内。
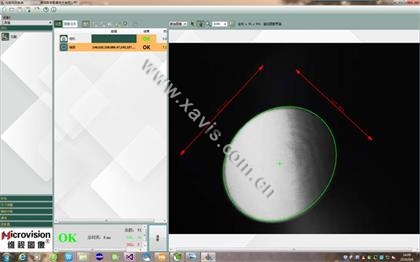
案例2:激光光斑扑捉,定位几何中心并发送给机器人,机器人根据位置信息,进行位置校正并作业。难点:光斑不均匀。
MVRV200系统参数(标准配备,可根据需求选择)
项目 | 名称 | 参数 | 备注 |
视觉部分 | 工业相机 | 三套,不同分辨率。 | 配套千兆网线、电源、SDK开发包、Demo |
百万像素工业镜头 | 三套,不同焦距。 | ||
机器视觉LED光源 | 三套,LED环形光源。 | ||
光源控制器 | 输入AC200~220V 输出DC24V。 | ||
机器视觉软件 | 智能软件 | ||
机器人部分 | 6轴机械手 | 6自由度,精度±0.025mm 运动范围901mm,最大速度600°/s,TCP最大速度8.9m/s,TCP最大加速度36m/s²,负载5Kg;功率200-600V,50/60Hz、0.38Kw,54kg。集成10路信号和4路空气。 | 配套有控制器、示教器。 |
机器人控制软件 | 可离线编程,具有丰富的编程和模拟功能。 | ||
机器人控制器 | 机器人语言:RAPID程序语言,支持结构化程序; | 功率指最大功率。 | |
工作环境温度 | 0~60℃ | ||
外型尺寸 | 3600×1400×1300 | 可拆分6个模组,方便运输。 |



联系电话:0755-84113311
传真:0755-21033842
24小时服务咨询:
销售部:18025412530(刘)
sales@ikxvision.com
地址:广东省深圳市龙华新区大浪街道浪荣路华新锐明工业区D栋2单元一楼101